Whitepapers
Home /
Featured
Linear Servo Motors and Actuators:
the secret weapon OEM engineers don’t know they have
Linear Servo Motors are a permanent-magnet-based technology to generate linear motion in one axis. They are relatively simple to build, design and integrate, and their extremely high reliability and increasing power density make them excel in an array of automated machines. In this article we answer four frequently asked questions about Linear Servo Motors.


Customizing Your Micro Direct-Drive Servo Motor
When choosing a motor, sure, you could go with an off-the-shelf product - rotary motors come in plenty of sizes, and you could always find one with “close enough” specs to meet your requirements. But when you’re planning to manufacture ...
Read More 
Linear Servo Motors in Semiconductor Applications
Linear Servo Motor servos are somewhat unknown in the machine builder market; they have usually been embedded deep within high-precision OEM systems that handle lithography, wafer scanning, and optical inspection applications. However, in the area of semiconductor automation, they are the ...
Read More 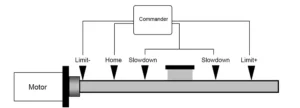
Building a motion control system: Limit switches and circuit considerations
Every motion control system will have specific limits where motion should occur. These limits are used to specify the range of motion to prevent damage to the machine itself, or personnel operating the machine. When a motion system has a ...
Read More 
Which type of linear stage should I choose?
Nippon Pulse offers two series of high-performance, single-axis linear stages: nanopositioning SCR stages, and Acculine SLP stages. Both series are ideal for small-scale or limited-space applications, and provide an excellent introduction to our Linear Servo Motor servos, the basis for all of ...
Read More 
Linear Servo Motors and Actuators: the secret weapon OEM engineers don’t know they have
Linear Servo Motors are a permanent-magnet-based technology to generate linear motion in one axis. They are relatively simple to build, design and integrate, and their extremely high reliability and increasing power density make them excel in an array of automated ...
Read More 
Servo Motor Terminology FAQ: What’s the difference between an industrial servo motor and a hobbyist-quality servo motor?
Nippon Pulse engineers are regularly approached by hobbyists and educators looking for servo motors. But there is a big difference between what these novice engineers are usually seeking — two-lead dc motors — and precision industrial servo motors run off ...
Read More 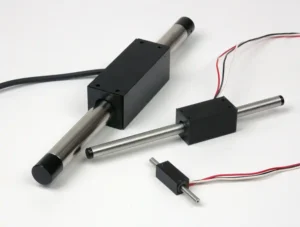
Linear Servo Motors and electronics to solve your machining problems
Design engineers run up against all kinds of issues when designing a new application – ensuring the motors meet force and size requirements, making sure the electronics to run the application are well-designed, and keeping costs down, just to name ...
Read More 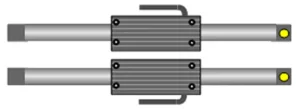
Configuring your Linear Servo Motor system
The design of the Linear Servo Motor allows you to replace the standard ball-screw system with the Linear Servo Motor and achieve higher speed and resolution. However, to achieve the highest performance, the entire system structure must be optimized. This ...
Read More 
Linear Servo Motor vs. Other Linear and Rotary-to-Linear Technologies
A short overview of the benefits of using a Linear Servo Motor servo in place of other popular linear motor options, as well as benefits over conventional rotary-to-linear systems. View Whitepaper
Read More 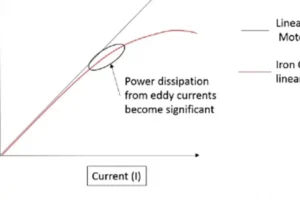
Force-current relationship important when using linear motion for part production
A basic need of the machine design is to be able to go to a position, and knowing where that position is relative to the workpiece. In looking at achieving accuracy in the movement of a workpiece or the tooling, ...
Read More 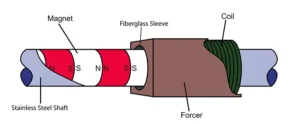
Linear Motor Systems: Iron Core, U-Channel, and Tubular Linear Motors
Introduction: There are three main direct drive linear motion systems on the market today. These three motor types have distinct advantages and disadvantages and, based on the application, one motor will be better suited than either of the other motors. ...
Read More
Linear Servo Motor 50 Percent More Efficient than Coreless Linear Servos
Linear motors have gained a name for themselves as being a high-precision and power-efficient alternative to conventional rotary-to-linear transmission systems. How is this possible? Well, let’s look at the Ball Screw, which also can be considered, in its own right, ...
Read More 